پۆرتاڵ
پەیوەندی
ئیمەیڵ
پۆڕتال
مۆدل
English
كوردى
عربي
Facebook
Twitter
Dribbble
Github
Pinterest
Instagram
+1.11.85412542
[email protected]
لیستا سەرەکی
دهربارهی زانكویێ
دیدە و ئەرك و بھا
جڤاتا زانكويێ
پەیاما سەرۆکا زانکۆیێ
هاريكارێ سهروكێ زانكويێ
هاريكارێ سهروكێ زانكۆيێ بو كاروبارێت زانستى وخواندنا بلند
هاريكارێ سهروكێ زانكۆيێ بو كاروبارێت كارگێرى ودارايى
هاريكارێ سهروكێ زانكۆيێ بو كاروبارێت قوتابيان
پێکهاتێ زانکۆیێ
ستراتیژی زانکۆ
رێڤەبەری
كهمپێن زانكويێ
ئارمانجێن گەشەپێدانا بەردەوام (SDGs)
راستیێن زوو
پەیوەندیێ ب مە بکە
ئەکادیمی
وەرگرتن
ساڵناما ئەکادیمی
باوەڕپێکرن
کۆلێژ
پەیمانگاکان
سەنتەر
زەمانەتی کواڵێتی
پرۆسا بۆلۆنیا
قوتابی
سهنتهرێ گهشهپێدانا كارى
ئێکەتیا قوتابیان
کارگێڕبا بزنسان
بەخشى خویندن
تومارا گشتى
پەیوەندیان
ئەندامێتی
ئۆفیسا پەیوەندیەکان
پرۆژێن پارەدار
لێکتێگەهشتنێن نێڤ دەوڵەتی
هاوڤبەشی
تيما مه
ڤهكولينێن زانستى
ڕێڤەبەریا گشتی یا سەنتەرێ ڤەکۆلینێن زانستی
گۆڤارا داسنیا يا ئەندازیاری و زئينفورماتيك
كونفرانس
سیمپۆزیۆم
خزمەت گوزارى
کۆگاها دیجیتاڵی
کتێبخانا ئهلكترونى
پۆرتاڵ
نوچهيێن ڤهكولينا
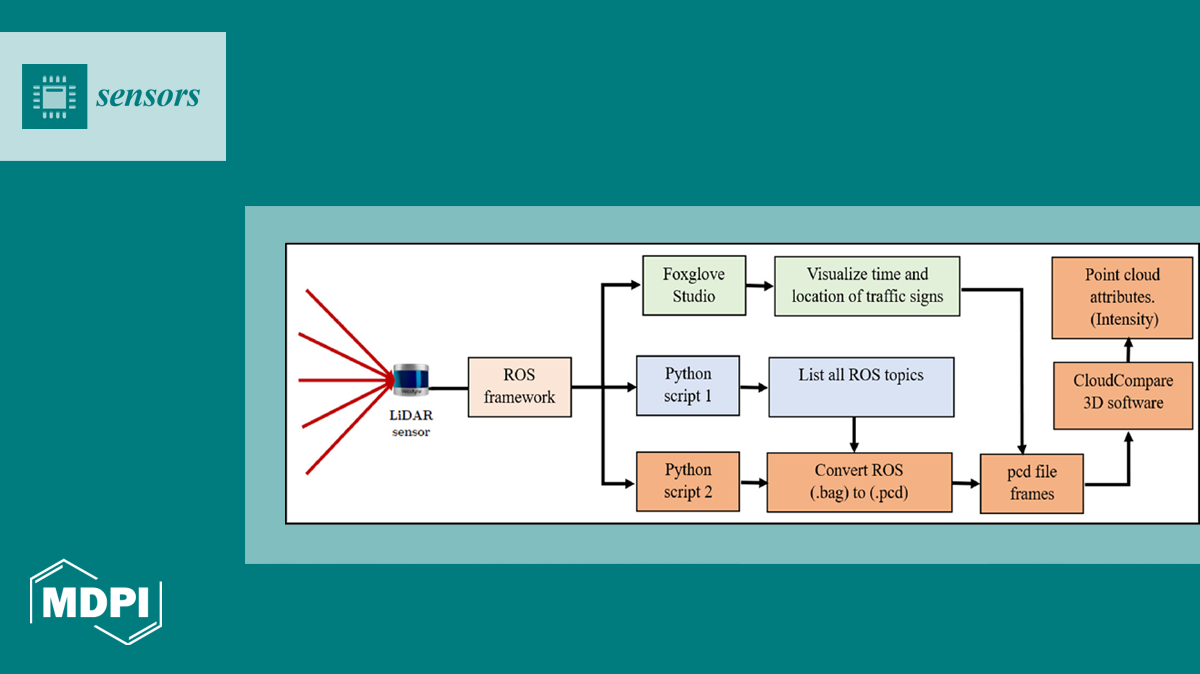
Improving Autonomous Vehicle Perception through Evaluating LiDAR Capabilities and Handheld Retroreflectivity Assessments
دەسپێك
ڤهكولينێن زانستى
نوچهيێن ڤهكولينا
Improving Autonomous Vehicle Perception through Evaluating LiDAR Capabilities and Handheld Retroreflectivity Assessments
Views: 5399
Improving Autonomous Vehicle Perception through Evaluating LiDAR Capabilities and Handheld Retroreflectivity Assessments